
Introduction:
DSHOT300 and DSHOT600 are digital ESC protocols used in FPV drones, differing primarily in signal rates. The choice between them depends on the flight controller type, with DSHOT300 suited for AIO controllers and DSHOT600 for F7 or F405-based controllers. Understanding these differences allows pilots to optimize their drone’s performance by selecting the appropriate protocol.
- Definition: DSHOT300 and DSHOT600 are digital ESC protocols used in FPV drones to regulate throttle communication between flight controller and ESCs.
- Selection Criteria: Choose DSHOT300 for AIO flight controllers (F411 chip) and DSHOT600 for F7 or F405-based controllers.
- Key Difference: DSHOT600 offers higher throttle signal rate compared to DSHOT300, potentially enhancing drone performance.
- Optimizing Performance: Selecting the appropriate protocol ensures efficient communication, resulting in smoother flight and improved responsiveness.
What you need:
Freestyle Recommended:




Racing Recommended:




If you’re tuning an FPV drone in Betaflight and staring at the ESC protocol options, chances are you’ve asked this exact question: DSHOT300 vs DSHOT600 — does it actually matter?
Short answer: yes, it does — but only if your hardware and flying style can take advantage of it.
Both DSHOT300 and DSHOT600 are digital ESC protocols designed to improve throttle precision and reduce latency compared to older analog methods like PWM or Oneshot. The real difference comes down to signal speed, timing resolution, and how hard you’re pushing your quad.
This guide breaks down the differences in plain FPV pilot terms — not marketing claims — so you can decide what actually makes sense for your build.
Check the guide to learn more about the Dshot protocol: What Is DShot in FPV? Complete Guide for 2026
👉 Explore the ESC and Flight Controller on MEPSKING.
What is DShot?
DShot is a digital ESC protocol for communicating throttle (and some commands) between your FC ↓ ESC. It differs from all other ESC protocols in that it is a digital signal. It offers enhanced performance and dependability, which is a positive step for ESC communication. You can give the ESCs specific commands in addition to motor speeds using DShot. Through the transmission of motor RPM data back to the flight controller, bi-directional DShot even permits two-way communication between the ESC and the flying controller, enabling sophisticated functions like RPM Filtering and Dynamic Idle.
The number (150, 300, 600, etc.) refers to the bit-rate: e.g. DShot300 = 300,000 bits/sec; DShot600 = 600,000 bits/sec. Higher bit-rates mean shorter signal frames, reduced delay from FC → ESC. You can choose from a range of DShot speeds, including DShot150 and DShot2400. Greater numbers indicate faster speeds, which provide lower latency, although they are not always better because of the higher CPU load and greater chance of data corruption. Selecting a DShot speed that is in line with your PID loop frequency is advised by Betaflight; going beyond won’t always improve your flying experience.
- DShot600: 600,000 bits/sec, 8K PID Loop Frequency
- DShot300: 300,000 bits/sec, 4K PID Loop Frequency
- DShot150: 150,000 bits/sec, 2K PID Loop Frequency
- DShot1200 and DShot2400 are currently not used in Betaflight.
What are DSHOT300 and DSHOT600?
DSHOT300 and DSHOT600 refer to digital ESC protocols used in FPV drones. These protocols determine the communication and signal rates of throttle between the flight controller and ESCs.
What is the DShot300?
DSHOT300 transmits throttle data at roughly 300 kbps per channel.
In real-world flying:
- Latency is already much lower than PWM or Oneshot
- Throttle response feels clean and predictable
- Works reliably on most modern ESCs and F4/F7 flight controllers
For many freestyle and cinematic pilots, DSHOT300 already feels “perfectly fine”.
What is the DShot600?
DSHOT600 doubles the data rate to ~600 kbps, which means:
- Commands reach the ESC faster
- Throttle steps are finer
- Motor response tracks stick input more closely
On paper, the latency difference looks small. In practice, high-RPM motors and aggressive flight styles expose that difference quickly.ne”.
DShot300 vs. DShot600: Key Differences
| Feature | DShot300 | DShot600 |
| Bitrate | 300 kbps | 600 kbps |
| Signal Transmission Speed | Slower | 2× Faster |
| Throttle Signal Refresh Rate | 16 kHz (for 8 kHz PID Loop) | 32 kHz (for 8 kHz PID Loop) |
| Latency | Slightly higher | Lower |
| Noise Susceptibility | Lower (More Reliable) | Higher (More Sensitive) |
| CPU Load on FC | Lower | Higher |
| RPM Telemetry Support | Yes (with BLHeli_32 or BLHeli_S with JESC) | Yes (with BLHeli_32 or BLHeli_S with JESC) |
| Best Use Cases | Long-range, cinematic, whoops, general freestyle | Racing, high-speed freestyle, aggressive maneuvers |
The primary difference between DSHOT300 and DSHOT600 lies in their signal rates. DSHOT600 offers a higher throttle signal rate compared to DSHOT300, thereby potentially enhancing the overall performance of the drone.

Signal Speed & Latency
DShot600 has a faster throttle signal update rate than DShot300, which theoretically improves motor response.
However, in real-world flight, the improvement is not always noticeable, especially if your PID loop is set to 8 kHz or lower.
- DSHOT300: Transmits data at 300 kbps, which translates to an average command latency of around 1.4–1.7 milliseconds. For most casual pilots—flying slow freestyle, cruising, or practicing basic maneuvers—this delay is unnoticeable. It’s reliable, doesn’t stress your FC or ESCs too much, and gets the job done for non-aggressive flying.
- DSHOT600: Doubles the bandwidth to 600 kbps, cutting latency down to roughly 0.7–0.8 milliseconds. That’s a sub-millisecond response time—critical for competitive racers or pilots pushing their quads to the limit (think flipping at 300 degrees per second, high-speed cornering, or weaving through tight gates). Every fraction of a millisecond counts when you’re fighting prop wash turbulence or trying to avoid a crash.
Reliability & Noise Sensitivity
DShot300 is more reliable than DShot600 because its lower frequency is less affected by electrical noise.
DShot600 is more susceptible to EMI (Electromagnetic Interference), especially if:
- Motor wires are long
- ESC signal wires run close to power cables or VTX
- Poor-quality ESCs or flight controllers are used
If you experience motor desyncs or random shutdowns, try switching from DShot600 to DShot300.
CPU Load on the Flight Controller (FC)
- DShot600 uses twice the data rate of DShot300, which increases CPU load on the flight controller.
- Older F4 flight controllers running many features (e.g., OSD, RPM filtering, Blackbox) may experience CPU bottlenecks with DShot600, leading to worse performance.
- DShot300 is often recommended for F4 boards, while F7 boards can handle DShot600 easily.
RPM Filtering & Bidirectional DShot
- Both DShot300 and DShot600 support RPM telemetry, which is crucial for RPM filtering in Betaflight & ArduPilot.
- RPM filtering is more important than choosing between DShot300 and DShot600 for smoother flight performance.
For most pilots, RPM filtering brings a bigger improvement than switching from DShot300 to DShot600.
DShot300 vs. DShot600: Pros & Cons
DSHOT300 Pros:
- Easier on older ESCs/FCs; more compatible.
- Less demanding on FC CPU and timer/DMA usage.
- More forgiving if the wiring or signal path isn’t perfect.
DSHOT300 Cons:
- Slightly slower response, more latency.
- Less margin at high RPM / aggressive maneuvers.
DSHOT600 Pros:
- Lower latency; faster commands, which matter when doing fast stick inputs and acro maneuvers.
- Smoother response in the high RPM range.
- Better matching for builds with high PID loop rates (4 kHz, 8 kHz) or fast motors.
DSHOT600 Cons:
- Demands better ESCs & FCs. Some ESCs might stutter, miss frames if the hardware isn’t good. Reports of motors stuttering with DShot600 in some setups.
- More sensitive to wiring noise, signal integrity.
- Slightly more stress on FC CPU/timers.
Choosing the Right ESC Protocol
The choice between DSHOT300 and DSHOT600 depends on the type of flight controller being used. AIO flight controllers, typically based on the F411 chip, are best suited for DSHOT300. Conversely, flight controllers utilizing F7 or F405 chips are better matched with DSHOT600.
Learn more: FPV ESC Protocol Guide: Understanding ESC Communication Protocols for FPV Drones


DShot300
- Your FC is an F4 or lower-end F7, and you’re running RPM filtering, OSD, and Blackbox logging.
- You fly long-range, cinematic, or whoops where smoothness & reliability are more important than ultra-fast response time.
- Your build has long ESC/motor wires or is prone to electrical noise issues.
- You’re experiencing random desyncs or ESC signal loss with DShot600.
DShot600
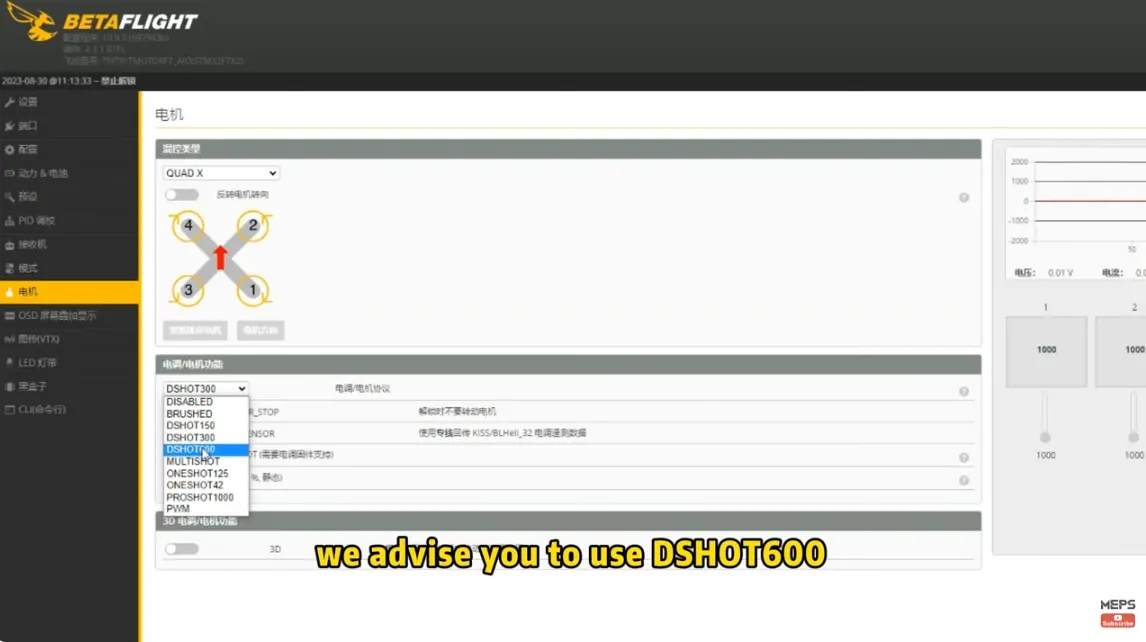
- You have an F7 or H7 flight controller with enough CPU power.
- You’re flying racing or high-speed freestyle, where the fastest motor response is beneficial.
- Your build has clean, short signal wires and minimal electrical noise.
- Your PID loop is running at 8 kHz or higher, making full use of the faster refresh rate.
For most pilots, DShot300 is the safer and more stable option, especially for freestyle, cinematic, and long-range drones. DShot600 is useful for racers and high-speed flying, but it can introduce signal noise issues, requiring good wiring and a high-end flight controller. However, if your FC has enough power and you’re flying high-speed racing drones, DShot600 may offer slightly better response times.
Ensuring Maximum Performance
Selecting the appropriate protocol is crucial for optimizing the performance of your flight controller. Using the correct protocol ensures efficient communication between the flight controller and ESCs, resulting in smoother flight characteristics and improved responsiveness.
My Experience
If I were building, here’s what I’d do:
- Always start with DShot300 if I’m not sure about ESC/FC quality. It gives safe performance and less risk.
- If I have high-end ESCs + clean wiring + high PID loop / fast motors, I’d upgrade to DShot600 to get sharper stick response and better control.
- Balance is key: more speed in the signal is great, but only if the rest of the system (ESC, FC, wiring) can handle it; otherwise, more speed might just bring more problems (noise, stutter, inconsistent behavior).
Can Skilled Pilots Feel the Difference between DShot300 and DShot600?
Yes — experienced pilots can feel the difference between DShot300 and DShot600, but only in the right scenarios. For beginners or casual flyers, the gap is subtle to nonexistent. For racers and aggressive freestyle pilots, it’s absolutely noticeable.
When Pilots Can Feel the Difference?
High-Speed Inputs & Snap Maneuvers
In fast stick movements—quick yaw snaps, split-S recoveries, tight corner exits—DShot600 feels more immediate. The quad reacts now, not a fraction of a moment later.
That difference comes from latency:
- DShot300 ≈ ~1.4–1.6 ms signal delay
- DShot600 ≈ ~0.7–0.8 ms signal delay
On paper that’s tiny. In real flying, especially above 80–100 mph, it’s the difference between:
- clearing a gate cleanly
- or grazing it and tumbling
Racers feel this instantly.
Prop Wash & Fast Recovery
When flying through dirty air (dives, reversals, power loops), DShot600 allows the flight controller to correct motor RPM before oscillations fully develop.
Pilots often describe this as:
- DShot300 → “slightly soft” or “rubbery”
- DShot600 → “locked-in” and “connected”
This is especially noticeable on:
- 5″ racing quads
- high-KV motors
- stiff frames with aggressive PID tuning
Micro Quads with High-KV Motors
On 2–3 inch micro builds, DShot600 can feel more dramatic than on larger quads.
Why?
- Motors spin faster
- Throttle resolution matters more
- Any delay is amplified
Many pilots report DShot300 feeling “mushy” during quick corrections, while DShot600 restores crisp control.
When Pilots Do NOT Feel the Difference?
Cinematic & Cruising Flight
If you’re flying smooth lines, steady throttle, or filming:
- DShot300 already exceeds human reaction speed
- Your footage won’t improve with DShot600
In fact, most cinematic pilots prioritize stability over responsiveness.
Beginner & Mid-Skill Pilots
If you’re still:
- learning orientation
- flying conservatively
- not pushing the quad to its limits
Your stick precision isn’t high enough yet to exploit DShot600’s advantage. The bottleneck is pilot input, not signal speed.
Gyro / CPU-Limited Setups
Some flight controllers (older F4s, BMI270 at low gyro rates) cap performance before DShot600 can shine.
If your system can’t maintain:
- stable loop timing
- clean signal integrity
DShot600 won’t feel better—and may even cause issues.
Can You Mix Dshot600 and Dshot300 ESCs on the Same Quad?
No. You should NOT mix DShot600 and DShot300 ESCs on the same quad. While Betaflight may allow it, doing so can introduce timing inconsistencies, uneven motor response, and harder-to-tune behavior.
Why Mixing DShot600 and DShot300 Causes Problems?
Asynchronous motor update timing
DShot is a digital, timed protocol.
When ESCs operate at different DShot speeds:
- DShot600 ESCs receive commands ~2× faster
- DShot300 ESCs update motor RPM more slowly
Result:
- Motors no longer respond in lockstep
- The quad feels slightly twisted under fast inputs
This shows up most clearly during:
- sharp yaw snaps
- fast throttle punches
- split-S recoveries
PID Loop Assumptions Break
The flight controller assumes:
All motors respond at the same rate.
Mixed DShot speeds violate that assumption.
Consequences:
- PID tuning becomes inconsistent
- One motor pair “lags” behind corrections
- Oscillations appear that cannot be tuned out cleanly
This is why mixed DShot setups often feel:
- floaty in one axis
- twitchy in another
Desync & Failsafe Edge Cases
In stress situations (full throttle + high RPM + prop wash):
- Faster ESCs react immediately
- Slower ESCs lag, then overcorrect
This mismatch increases the chance of:
- brief motor desyncs
- momentary thrust imbalance
- random twitching under load
These issues are rare but real, especially on:
- racing quads
- high-KV setups
- micro drones with aggressive tuning
Betaflight Configuration Conflicts
Betaflight applies one global DShot setting per motor output group.
If ESCs differ:
- Some ESCs are pushed beyond optimal timing
- Others run below their best performance range
You end up compromising both ESC types.
When Mixing Might Appear to “Work”?
There are a few edge cases where pilots report “no issues”:
- cinematic cruising
- low throttle usage
- conservative PID tuning
- identical ESC hardware with different firmware limits
But this is false stability — problems show up the moment you push harder.
FAQs
Is DShot300 fast enough for my FPV drone?
Yes — DShot300 is absolutely fast enough for most FPV drones, especially tiny trainers and builds using BMI270 gyros.
Why You’re Limited to DShot300?
In Betaflight, DShot speed is limited by the gyro sampling frequency, not by the ESC.
- Your BMI270 gyro runs at 3.2 kHz
- Betaflight calculates the PID loop every time the gyro is sampled
- Motor commands are sent once per PID loop
Betaflight’s rule is simple:
Motor output must finish before the next gyro sample.
Because of that, Betaflight will not allow DShot speeds that exceed what the gyro loop timing can safely support. With a 3.2 kHz gyro, DShot300 is the highest practical option.
Does faster DShot actually improve flight feel?
This is where opinions diverge.
Betaflight Developers’ Position
- As long as motor output finishes before the next gyro sample, there is no benefit to sending it faster
- Faster DShot adds CPU load with no measurable gain
- ESC updates faster than the PID loop do not improve control
This is why Betaflight restricts higher DShot speeds.
The Counterargument (KISS / Ultra Developers)
- Output motor commands as soon as PID is calculated
- Don’t wait — get “hot and fresh” data to the ESCs immediately
- Supports much faster protocols (up to DShot2400)
Is DSHOT600 better than DSHOT300?
DSHOT600 is faster, but not universally better.
DSHOT600 sends throttle commands at twice the speed of DSHOT300, which reduces signal latency between the flight controller and ESC. In theory, this allows for more precise motor response—but only under the right conditions.
DSHOT600 works best when:
- The flight controller has enough CPU headroom
- ESCs are high-quality and properly tuned
- Wiring is clean with minimal electrical noise
- The pilot flies aggressively (racing or high-speed freestyle)
For many pilots, DSHOT300 provides a better balance of stability, compatibility, and reliability.
Can beginners use DSHOT600?
Yes, beginners can use DSHOT600—but it’s usually not recommended.
While DSHOT600 is supported by many modern flight controllers and ESCs, beginners rarely benefit from its lower latency. More importantly, DSHOT600 is less forgiving when hardware or wiring quality isn’t ideal. Most new pilots will fly smoother, crash less, and learn faster on DSHOT300.
Does DSHOT600 improve battery life or motor efficiency?
No. DSHOT600 does not improve efficiency or battery life.
DSHOT600 only affects how fast throttle commands are sent, not how efficiently motors convert power into thrust. It does not:
- Reduce current draw
- Improve flight time
- Increase thrust per watt
- Make motors run cooler
Battery life and efficiency depend on:
- Motor size and KV
- Propeller choice
- Weight and thrust-to-weight ratio
- ESC efficiency and tuning
- Flying style
If longer flight time is your goal, optimizing motors, props, and weight will matter far more than switching from DSHOT300 to DSHOT600.
Conclusion
Understanding the distinctions between DSHOT300 and DSHOT600 allows pilots to make informed decisions when configuring their FPV drones. By selecting the right protocol based on the flight controller type, pilots can unlock the full potential of their FPV drone.