
Introduction:
FPV desync happens when an ESC loses sync with its motor, causing the motor to stall or cut out mid-flight. To fix it: inspect your hardware, add a low-ESR capacitor, and tune BLHeli & Betaflight settings like rampup power, demag compensation, and motor idle to stabilize your system.
What is Desync Issue?
FPV desync (ESC desync) occurs when the Electronic Speed Controller (ESC) fails to keep up with the motor’s commutation timing. Once the ESC loses track of the motor’s position, the motor stalls and your drone can violently spin (death roll) and crash.
Typical signs of FPV motor desync:
- Sudden flip or roll mid-air (usually just one motor stops)
- Stuttering noise from one motor
- Blackbox logs showing a motor command hitting 100% while thrust drops
For example:
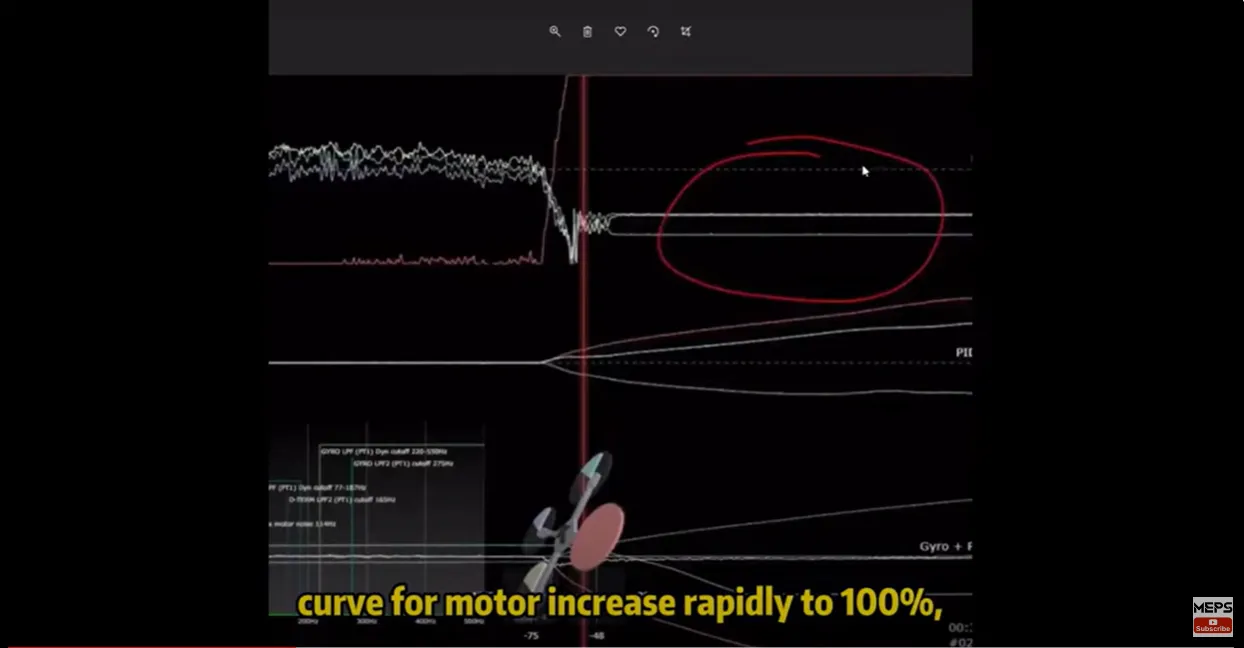
Sometimes in flying, when you push the throttle and do some action, one of your motors will stop spinning, and then most likely you will crash.
When reviewing the black box data, you may find the control signal curve for the motor increases rapidly to 100%. However, the gyroscope records indicate that the aircraft’s attitude did not respond as expected to this motor speed increase; instead, it suddenly dropped to zero.
Pro Tip: Not every crash is a desync — battery brownouts, failsafe events, or burnt motors can look similar. Always verify with Blackbox or DVR footage.
Common Causes of ESC Desync
High KV Motors & Excessive RPM
- High-KV motors can spin faster than older ESCs can handle.
- ESC misses “zero crossings” and loses sync.
Sudden Throttle Changes
- Rapid throttle spikes or braking stress the ESC’s timing logic.
- Often happens during aggressive freestyle maneuvers.
Damaged Hardware
- Worn bearings, burnt windings, or faulty MOSFETs disrupt motor signals.
- A bad solder joint or broken wire can trigger desync.
Electrical Noise & Voltage Drop
- Noise from long wires or poor filtering disrupts ESC sensor feedback.
- Sudden voltage sag from weak LiPos can momentarily shut down an ESC.
If your motor RPM gets too high, your ESC can start missing the motor’s “zero crossings” during commutation — and electrical noise only makes it worse. When that happens, the ESC can’t tell exactly when to send the next pulse to create the magnetic field that keeps the motor spinning. If it keeps missing those signals, the motor can end up stalling mid-flight.
How to Fix Desync for FPV Drone?
Step 1 – Inspect Your Hardware
- Check motors, ESCs, and wires for physical damage or burnt smell.
- Make sure all solder joints are solid and no prop is cracked or bent.
- Replace any suspect motor or ESC.
The easiest way is to replace the ESC or motor. Hardware replacement typically resolves the issue completely, but be mindful of using different hardware models. On the other hand, replacing hardware can be costly.
Step 2 – Test Motors in Betaflight
- Go to Motors Tab and slowly spin each motor.
- If a motor twitches or stalls, it likely has ESC or motor sync issues.

Step 3 – Add a Low-ESR Capacitor
- Solder a 470 µF–1000 µF low-ESR capacitor directly to the ESC power pads.
- This reduces electrical noise and helps prevent ESC desync under load.
Step 4 – Tune BLHeli Settings
In BLHeli Configurator:
- Rampup Power: Lower it (BLHeli_S → 0.125, BLHeli_32 → 12%).
- Demag Compensation: Set to High to improve desync recovery.
Start low and increase gradually until props spin smoothly without desync.
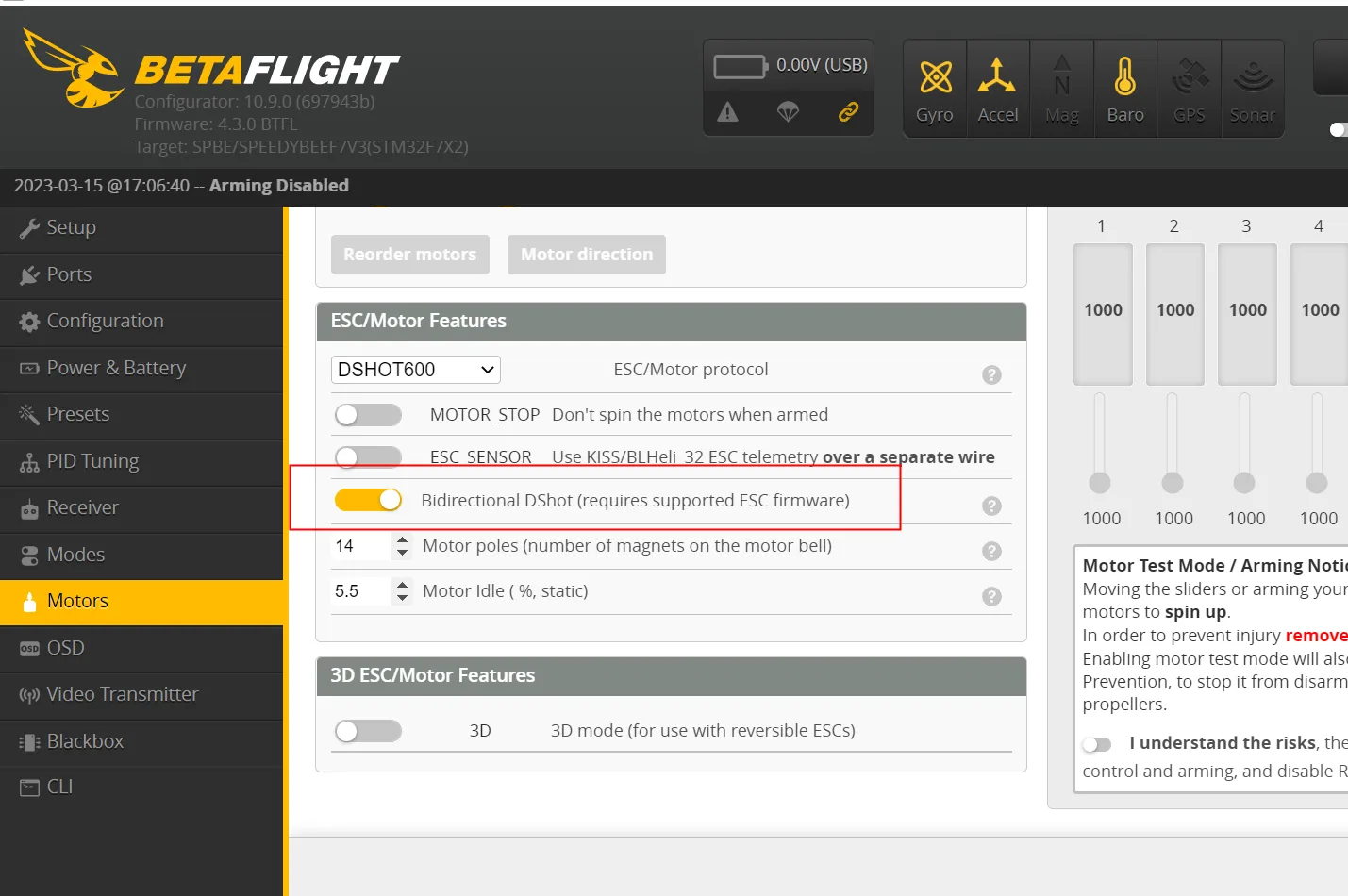
Step 5 – Adjust Betaflight Settings
In Betaflight Configurator:
- Use DShot ESC protocol.
- Raise Motor Idle Throttle from default 5.5 to around 6.5–7.
- If enabled, try lowering or disabling Dynamic Idle.
Step 6 – Smooth Out Your Flying Style
- Avoid sudden full-throttle punches followed by hard brakes.
- Gradual throttle transitions reduce stress on the ESC.
Other Ways to Fix FPV Desync Problem
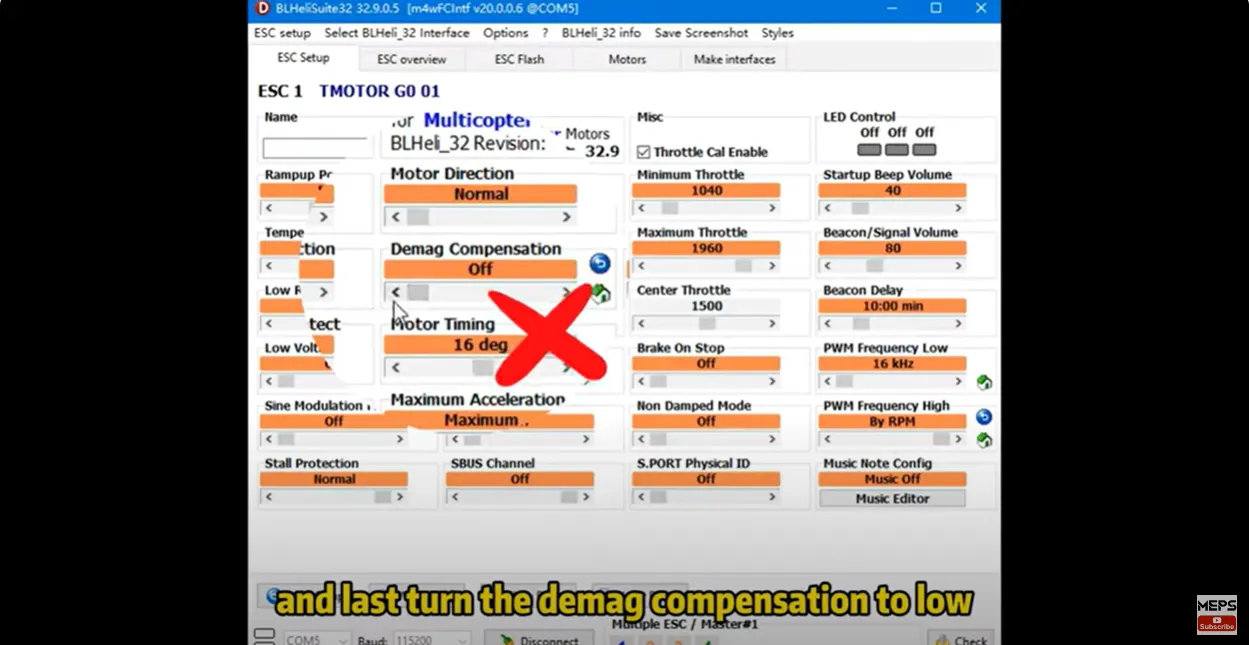
There are some other ways adjust when you don’t want to change your hardware.
- First chance the motor timing to auto;
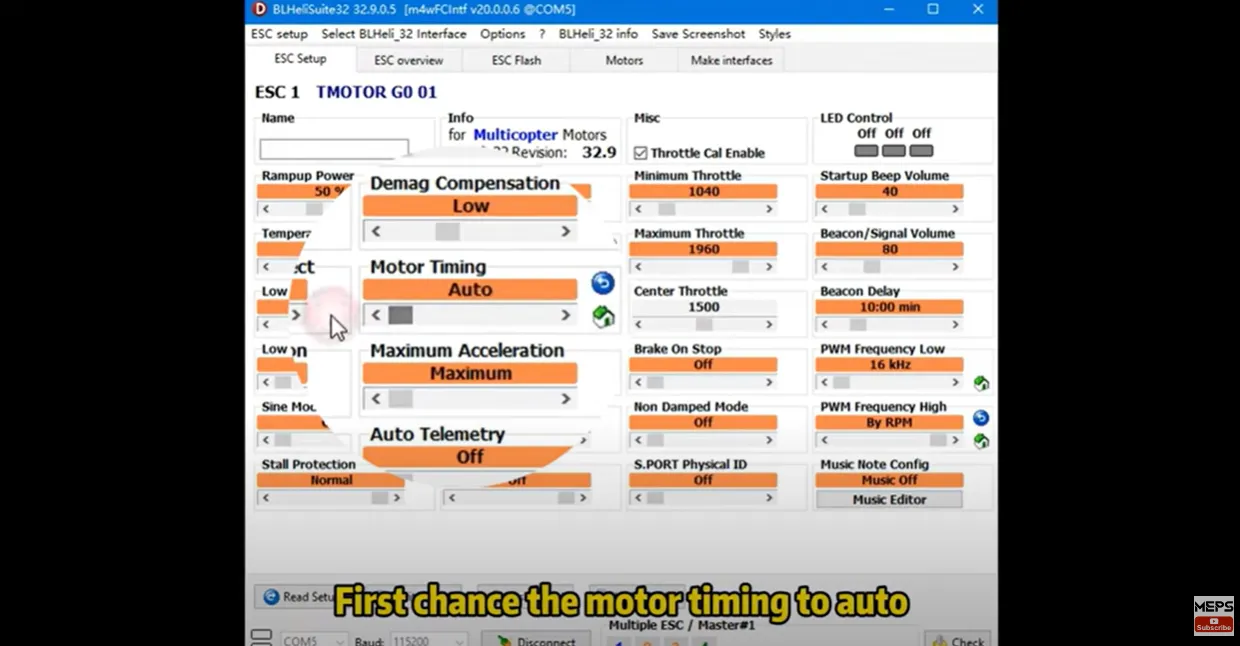
- Second, change the PWM frequency range from 16kHz to By PRM.
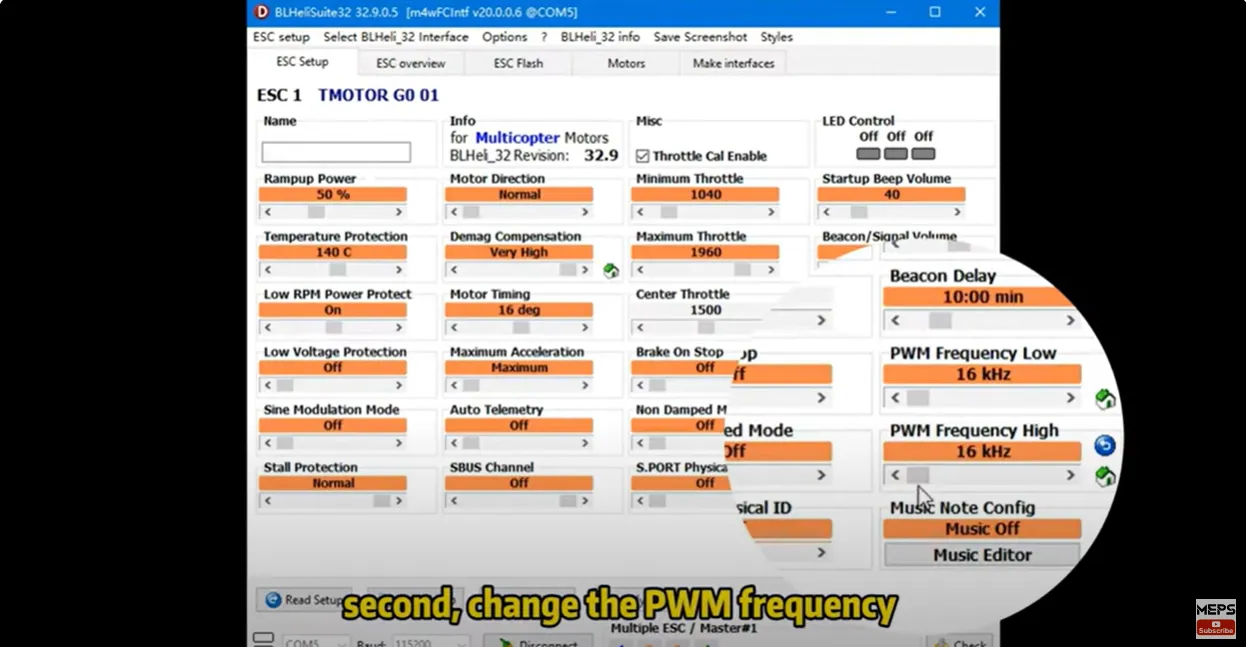
- Last turn the demag compensation to low,it will help you recover after the desync.
Pro Tips to Prevent Future FPV Motor Desync
- Match high-KV motors with high-quality ESCs (e.g., BLHeli_32).
- Regularly inspect wiring, solder joints, and motor temps.
- Use Blackbox logging to spot issues early.
- Replace aging ESCs and motors before they fail mid-flight.
Sometimes a severe desync can permanently damage an ESC or even the FC. If you end up needing replacements, the MEPSKING VINE VOICE program gives pilots a chance to try new FPV parts for free and share real-world feedback with the community. It’s a simple way to test ESCs, flight controllers, and motors without extra cost.

Conclusion
FPV motor desync is frustrating, but almost always fixable. By combining solid hardware, clean power, and proper ESC tuning, you can eliminate ESC desync issues and fly with confidence.
Start with physical checks, then move on to BLHeli and Betaflight tuning—this method solves 90% of desync problems experienced by FPV pilots.