
Choosing the right flight controller (FC) firmware can be overwhelming for FPV drone pilots, UAV enthusiasts, or RC hobbyists. Among the most popular options—Betaflight, INAV, and ArduPilot—each firmware is designed with unique strengths to match different flying styles, platforms, and mission types.
- Betaflight is optimized for FPV racing, freestyle, and acrobatic flying, offering precise manual control, advanced PID tuning, and high responsiveness.
- INAV excels in GPS-assisted navigation, long-range flights, and fixed-wing aircraft, combining stability with ease of use.
- ArduPilot is a professional-grade firmware focused on autonomous missions, surveying, and multi-vehicle support, providing the most comprehensive features for research and commercial UAVs.
Understanding your flying goals, drone type, and preferred flight style is key to picking the right firmware. This guide will help you compare their strengths, limitations, and use cases so you can confidently choose the FC firmware that fits your needs.
And join MEPS drone shop to buy FPV drone to fly!
What is Flight Controller Firmware?
Flight controller firmware is the “brain software” that runs inside your drone’s flight controller. While the hardware (the FC board) contains sensors like gyros and accelerometers, it’s the firmware that interprets that sensor data, processes your stick inputs, and tells the motors how to respond.
In simple terms:
- Without firmware, the FC is just a circuit board.
- With firmware, it becomes a smart system that keeps your quad stable, responsive, and tuned to your flying style.
Different firmware versions have different benefits and drawbacks for different flying philosophies. There are three FC Firmwares of FPV drones that will be introduced: Betaflight, Ardupilot and INAV.
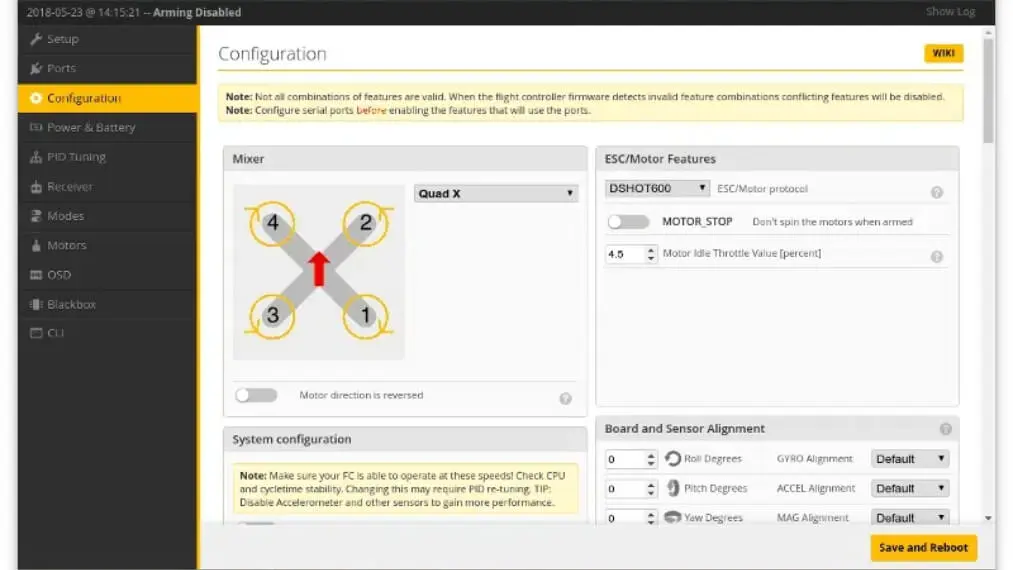
What is Betaflight?
Betaflight is by far the most used software in the world for FPV drones, where agility and responsiveness are paramount. The reason for this is the integration of the acro as a flight mode in the software, allowing for sharp turns and incredible speeds. With Betaflight having a tight integration with Cleanflight, it has inherited all the things it was loved while adding a whole new set of options and customization for users to tune and fly to their own tastes, or use a simple preset and with the click of a button, be ready to go! With highly customizable PID tuning, all unwanted flight characteristics can be filtered out, and with a little knowledge, Betaflight will be the only FC firmware you will ever use. Sadly, not all things can be positive, so here are some drawbacks of Betaflight. For one, Betaflight is far less suitable for mapping and aerial photography, as there are no autonomous modes, and returning home leaves a lot to be desired and there is currently no support for wings at all. There is also a steep learning curve, but there are guides plastered all over the internet that can help you out in a second.
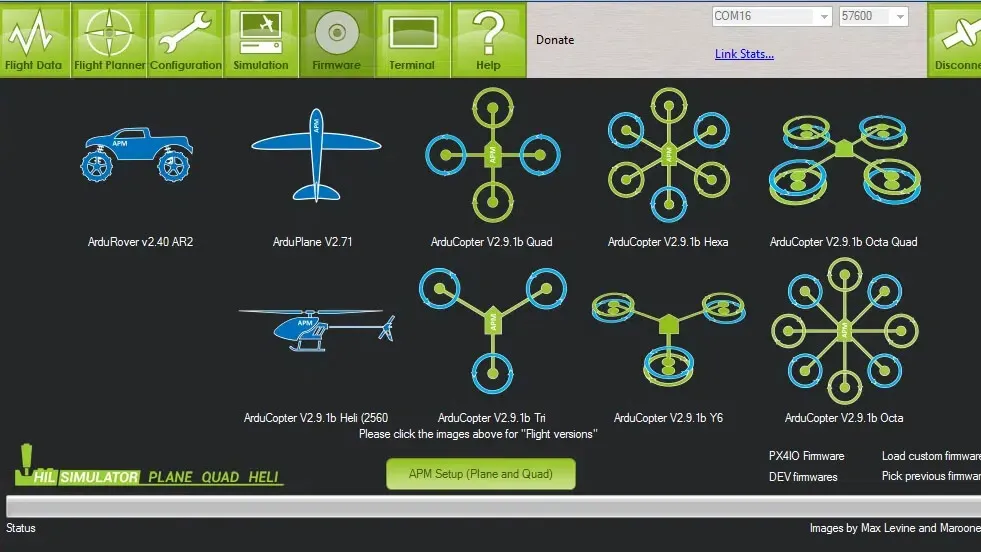
What is ArduPilot?
ArduPilot is an advanced, open-source UAV firmware known for its versatility, stability, and reliability. It supports a wide range of platforms—including multirotors, fixed-wing aircraft, helicopters, and even ground or sea vehicles—making it one of the most comprehensive autopilot systems available.
Because of its proven stability and built-in redundancies, ArduPilot is widely used in aerial mapping, photography, and extreme long-range missions where safety and reliability are critical. It has a large, active community that continuously improves its features, and tutorials are readily available, making it accessible to both hobbyists and researchers.
However, this feature-rich system comes with trade-offs:
- It requires more powerful (and often more expensive) hardware.
- Its focus on stability and ease of use makes it less suitable for acrobatic or freestyle flying.
- Like Betaflight, it has a steep learning curve, but once mastered, it allows for highly efficient setup and operation.
In short, ArduPilot is ideal for pilots and professionals who value precision, safety, and advanced features over high-speed freestyle performance.
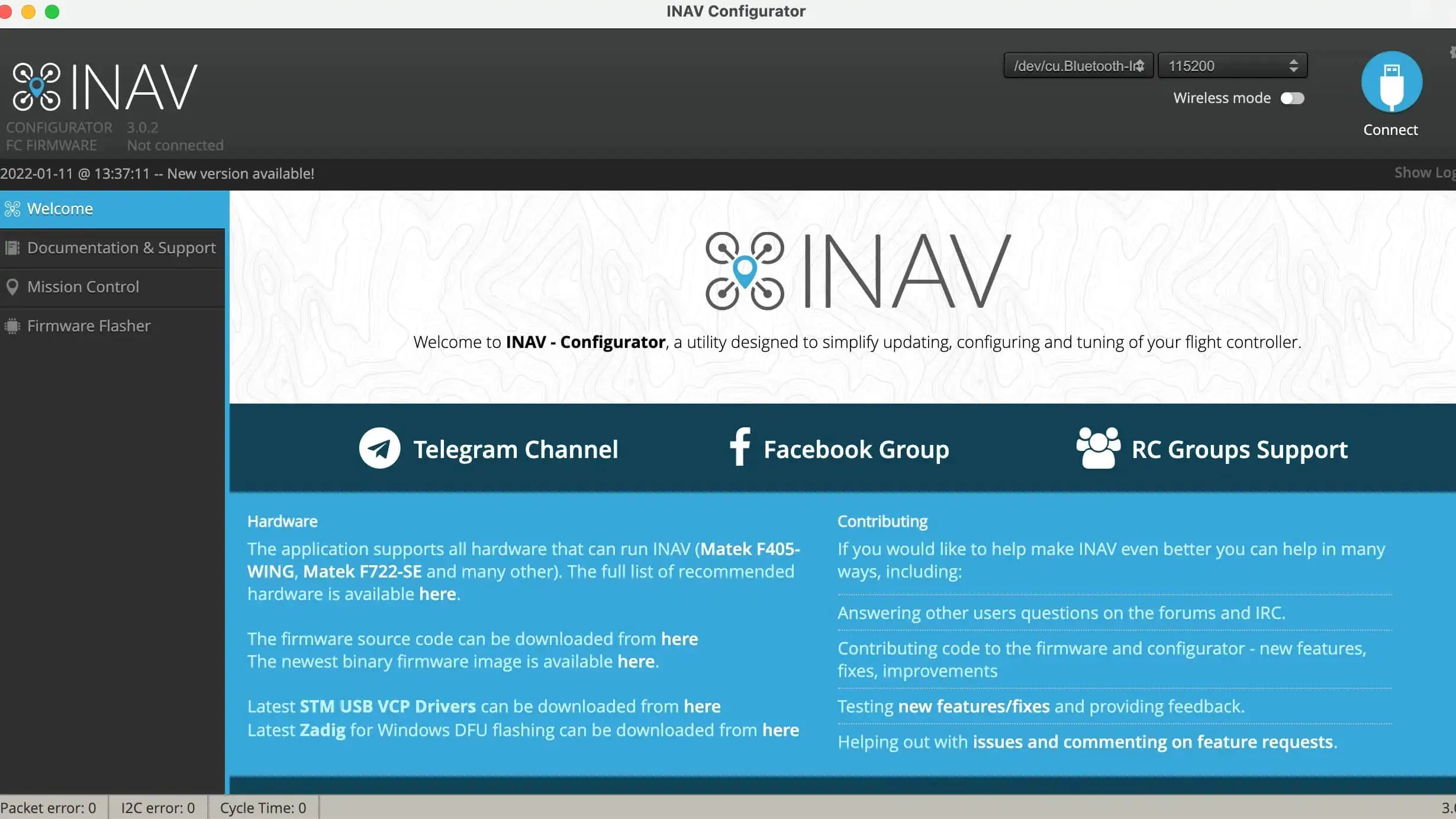
What is INAV?
INAV is another FC firmware that is known for its stability and reliability, and it runs on most F4, F7, AT32 and H7 flight controllers, making it versatile and a great option if Ardupilot is not supported with your hardware.
INAV has a remarkably similar interface to Betaflight and can run many commands, such as waypoint missions, position hold, RTH and many other things such as orbit and other cinematic features. It is optimized for long range fixed wing missions but can still run on multirotors, rovers and even boats! Though limited in its features with other modes of UAV, learning INAV can be incredibly useful if you fly fixed wing, allowing you to translate your skills to different applications and still achieve amazing results. It also is one of the easiest flight software to learn with an easy interface and large active development community.
Unfortunately, compared with the likes of ArduPilot, INAV falls behind as though supported; other forms of UAV unlike fixed wings have limited features while in its main area of fixed wings, there is less customization offered. Other than this, INAV is still a top contender in the space of flight controller firmware.
Comparison of Betaflight, Ardupilot and INAV
Flight characteristics: ArduPilot and INAV are known for their reliability and stability while also being known for their lack of agility and as such, the performance and responsiveness prioritizing firmware Betaflight reigns supreme for FPV and cinematic applications. For all autonomous applications, ArduPilot and INAV are the right choices, with INAV having formidable performance in fixed wing, with ArduPilot filling the gaps with INAV as the best choice for autonomous multirotors.
| Feature / System | Betaflight | INAV | ArduPilot (ArduCopter) |
|---|---|---|---|
| Primary Use | FPV racing & freestyle | GPS-assisted FPV & mid-range cruising | Professional & autonomous drone use |
| Flight Modes | Manual, Angle, Horizon, Acro | Angle, Horizon, Acro, GPS modes | Full GPS modes, Auto, Loiter, RTL etc. |
| GPS Navigation | Limited (basic failsafe/OSD) | Yes (with RTH, Waypoint, Loiter) | Advanced (missions, geofencing, etc.) |
| Autonomous Features | Minimal | Moderate | Extensive (fully autonomous missions) |
| Tuning Complexity | Moderate (mainly for racing) | Moderate (adds GPS tuning) | High (many parameters) |
| Hardware Support | F4, F7, H7 flight controllers | Same as Betaflight | Broad, includes Pixhawk, CUAV, Matek |
| Target Audience | FPV racers, freestyle pilots | Long-range, cruiser pilots | Surveyors, researchers, and commercial UAV |
| Firmware Size | Lightweight | Moderate | Heavy |
| Documentation | Good (FPV-focused) | Good | Extensive |
| Community Support | Huge (FPV world) | Growing | Very large (multi-vehicle community) |
Betaflight: Pros & Cons
Best for: FPV Racing, Freestyle, Acro Practice
Pros:
- Highly responsive and optimized for fast, acrobatic flight
- Huge community and frequent updates
- Seamless integration with FPV gear (OSD, VTX control, etc.)
- Cleanflight-based, fast PID loops (up to 8kHz)
Cons:
- Limited GPS features
- Not suitable for autonomous missions or precise navigation
- No onboard mission planning
Use Case Examples:
- 5-inch racing drones
- Freestyle quads
- TinyWhoops and Cinewhoops (when acro is preferred)
INAV: Pros & Cons
Best for: Mid-Range FPV with GPS, Fixed-Wing, Casual Cruising
Pros:
- Supports GPS navigation: RTH, Loiter, Cruise, Waypoints
- Better fixed-wing and plane support than Betaflight
- Easier than ArduPilot for newcomers to GPS features
- Retains acro modes from Betaflight
Cons:
- Less optimized for pure racing or freestyle
- Autonomy is limited compared to ArduPilot
- Community and resources are smaller than Betaflight
Use Case Examples:
- Long-range quadcopters (e.g., 7-inch cruisers)
- Fixed-wing FPV planes with GPS
- Casual flyers who want safety features like RTH
ArduPilot (ArduCopter): Pros & Cons
Best for: Commercial Use, Robotics, Research, UAV Mapping
Pros:
- Full autonomous flight planning (Auto missions, Surveys)
- Advanced GPS and sensor fusion
- Broad hardware compatibility (Pixhawk, Cube, Matek, etc.)
- Supports VTOL, helicopters, planes, rovers, boats
Cons:
- Steep learning curve (many parameters)
- Heavier firmware—needs higher-end hardware
- Less focus on FPV acro/racing performance
Use Case Examples:
- Professional mapping drones
- Delivery or surveillance UAVs
- Agricultural drones, VTOL crafts
Which FC firmware is Right for You?
| Your Needs | Recommended Firmware |
|---|---|
| FPV Racing / Freestyle Only | Betaflight |
| GPS-assisted Long-range / Mid-range Flying | INAV |
| Full Autonomy / Mission Planning / Research | ArduPilot (ArduCopter) |
| Fixed-Wing with GPS | INAV or ArduPilot |
| VTOL or Hybrid Aircraft | ArduPilot |
Betaflight
Betaflight is the best FC firmware available right now which is driven by performance and agility. It has enough safety features, such as return to home and crash flip, making it hard to lose your drone if flying responsibly. It supports all sizes of FPV from small 65mm whoops to beast class and more! This is the software I recommend for all pilots thinking about flying fast or getting into racing.
INAV
INAV is an amazing piece of firmware. Being applied in many fields such as commercial, research and agriculture, INAV is known for its set of features in the world of fixed wing aircraft. Its less steep learning curve and suite of features make it an excellent choice for beginners and veterans alike and much like the other two, this open-source firmware has a large and active developer community backing it with the latest updates being released frequently. Recommended for fixed wing pilots as that is what INAV excels at.
ArduPilot
ArduPilot is the best FC firmware out right now, supporting autonomous waypoint missions. It is an open-source, reliable autopilot system that works with a wide range of vehicles, including boats, submarines, rovers, fixed-wing aircraft, multiroters, and conventional helicopters. There is a sizable professional and enthusiast group working on the source code and constantly improving it with new developers welcomed. It is world renowned for its stability and reliability and is used by the top pilots to execute commands and missions. Recommended for those delving into the world of long range, waypoint missions, or just someone trying to automate any UAV under the sun.
What is the Best Firmware for Flight Controllers? (For FPV Drones)
When it comes to FPV drones, the best firmware for flight controllers depends on your flying style, drone type, and goals. Here’s a breakdown of the top firmware options, followed by a recommendation based on different FPV use cases:
Best Firmware Options for FPV Drones
| Firmware | Best For | Key Strengths |
|---|---|---|
| Betaflight | Freestyle, Racing, Cinewhoop | Ultra-responsive, active development, excellent tuning for manual control |
| INAV | Long-range FPV, GPS-assisted flight | GPS features (RTH, Loiter), easy for hobbyists, supports fixed-wing as well |
| EmuFlight | Advanced freestyle (tuned pilots) | Alternative Betaflight fork with smoother stick feel and filtering |
| KISS | Top-tier freestyle and racers | Minimalist, “locked-in” feel, beloved by pro pilots like Mr. Steele |
| FalcoX | Premium racing/freestyle setups | Plug-and-play tuning, slick UI, proprietary (FlightOne ecosystem only) |
Best Firmware by FPV Use Case
| Use Case | Recommended Firmware | Why? |
|---|---|---|
| Freestyle (Manual Tricks) | Betaflight or KISS | Betaflight for open-source + tuning; KISS for premium feel |
| Racing (Speed & Agility) | Betaflight or FalcoX | Fast loops, optimized response; FalcoX for out-of-box performance |
| Cinematic Cinewhoop | Betaflight | Smooth control, RPM filtering, and stability |
| Long-range Cruising | INAV | GPS Return-To-Home, Waypoints, Alt Hold, better safety features |
| Fixed-wing FPV | INAV or ArduPilot | INAV for simplicity; ArduPilot for full autonomy |
| Autonomous Missions | ArduPilot | Full waypoint planning, telemetry, scripting |
If you’re flying FPV quads (3″–7″) for freestyle, racing, or cine-style video, Betaflight is your best bet.
It’s fast, open-source, customizable, and extremely well supported.
- But if you’re building a long-range or GPS-enabled cruiser, go with INAV.
- For pro-level autonomous missions, ArduPilot is unmatched.
Is INAV Better than Betaflight?
Betaflight – The Go-To FC Firmware for Racing and Freestyle FPV Drones
The best option will rely on your unique requirements as a drone pilot because both INAV and Betaflight have advantages and disadvantages. Betaflight is a superior option if you’re a racing or freestyle FPV drone driver who needs total control over the operation of your drone. You may adjust your drone’s behavior to your preference with Betaflight’s sophisticated capabilities, which include custom PID tuning and black box logging.
INAV – The Best FC Firmware for Navigation and Autonomous Flights
However, INAV is a preferable option if you want to use your drone for autonomous flights or navigation. For drone pilots who want to explore new areas or record footage from unusual angles, INAV’s RTH and waypoint navigation tools are immensely helpful. Furthermore, INAV’s barometer and GPS capabilities provide more accurate flying and improved control in general.
Ardupilot vs Betaflight
The most widely used drone firmware, Ardupilot, is capable of controlling a wide range of vehicles. It has all the features of an autopilot system. It supports a wide range of devices and software. Many commercial systems take advantage of it.
Betaflight is a state-of-the-art firmware, mostly used for quadcopters. It is also the best currently available for FPV drones. You can also maximise the speed of your drone. Drone racing is a good use for this firmware.
Although both firmwares are excellent, I would recommend Ardupilot as it is simpler and more suitable for beginners. Betaflight is also a good choice if you want to fly at high speeds and freestyle.
Betaflight is a cutting edge firmware, mostly used for quadcopters. And so far it is the best for FPV drones. And you can get the most speed out of your drone. This firmware is good for drone racing.
They are both good FC firmwares but I would recommend Ardupilot, because in my opinion it is easier and good for beginners. And if you are going for fast speeds, Betaflight would be a good option.
Why Betaflight Is the Best All-Around for Most FPV Pilots
Pros:
- Most widely supported (works on nearly all F4/F7 flight controllers)
- Massive user base and tutorials
- Regular updates and new features (e.g., RPM filtering, PID enhancements)
- Great configurator UI for tuning and setup
- Supports all major flight modes: Acro, Angle, Horizon
Cons:
- Not designed for full GPS navigation
- May require manual tuning for best performance
Final Verdict: INAV, Betaflight, or ArduPilot?
All three firmware options are excellent — but serve different purposes:
- Choose Betaflight if you want high-performance FPV flying, racing, or freestyle.
- Choose INAV if you need GPS stability, navigation features, and easy long-range support.
- Choose ArduPilot for autonomous drone missions, surveying, or professional UAV systems.
No single firmware is best for every use case, but understanding your goals will help you pick the right one.
FAQs
What is the Best Firmware for FPV Drones?
Betaflight is the leading FPV drone firmware, built for speed, precision, and freestyle control. And so far it is the best for FPV drone. Its huge community support and wide hardware compatibility make it the top choice for both racers and freestyle pilots at any budget.
What is the Latest Betaflight Firmware?
As of now, the most recent official stable firmware is Betaflight 4.5.2. It includes a range of important fixes like improvements to telemetry compatibility (Spektrum/SRXL), better OSD rendering, and bugfixes across protocols and hardware support. This is the version most pilots should use for reliable performance and stability.
Betaflight is transitioning to a new versioning and release schedule. The next major update will be 2025.12, effectively marking the Betaflight 4.6 release. According to reports, the Betaflight 4.6 update introduces numerous exciting advanced features, including GPS-assisted flight modes (Hover Mode, Point-to-Point Mode, Auto-Landing), a built-in chirp signal debugging tool, enhanced Turtle Speed Mode, LED upgrades, optimized cinematic/long-range debugging tools, and fixed-wing flight options.
What Boards does Betaflight Not Support Anymore?
Betaflight no longer supports old F1 flight controllers (like Naze32) and many F3 boards. Newer firmware mainly supports F4, F7, and H7 boards.
STM32 F3-Based Flight Controllers
Because modern Betaflight features quickly exceeded the 256KB flash limit on F3 chips, support for STM32 F3 FCs was dropped after Betaflight version 4.0. You’ll still connect and fly—but only if you stay on 4.0 or earlier. Upgrades beyond that won’t be available, and many features have been stripped to squeeze the firmware into limited memory. Affected boards include popular models like SPRacingF3, Omnibus F3, AIORACERF3, ChebuzzF3, FuryF3, and the F3 Discovery variant.
FrSky SPI Receivers: Deprecated Protocol Support
While Betaflight will still compile code for boards with built-in FrSky SPI receivers, the development team has stopped actively maintaining this feature due to complexity and lack of support from FrSky. Starting around v4.5, these boards will technically work—but without any bug fixes or official support. If you rely on these integrated receivers, it’s best to migrate to UART-based protocols like SBUS or FPort, or switch to a more supported option such as ExpressLRS.
| Unsupported or Deprecated | What You Need to Know |
| STM32 F3-based FCs | Dropped support after v4.0—limited to older firmware versions only. |
| F3 Targets (e.g., SPRacingF3) | Need legacy Betaflight 4.0 or older to remain functional. |
| FrSky SPI Receiver Protocol | Still compiles but not maintained—use UART options instead. |